



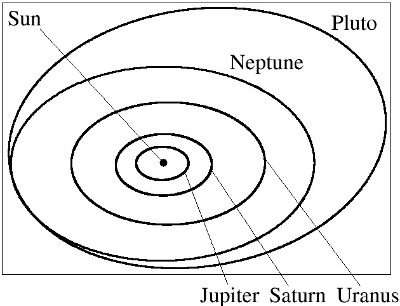
The next example in this tutorial is a simulation of the outer solar system, consisting of the sun, Jupiter, Saturn, Uranus, Neptune and Pluto.
Each planet and of course the sun will be represented by mass points. The interaction force between each object is the gravitational force which can be written as
Fij = -γ mi mj ( qi - qj ) / | qi - qj | 3
where γ is the gravitational constant, mi and mj are the masses and qi and qj are the locations of the two objects. The equations of motion are then
dqi / dt = pi
dpi / dt = 1 / mi Σji Fij
where pi is the momenta of object i. The equations of motion can also be derived from the Hamiltonian
H = Σi pi2 / ( 2 mi ) + Σj V( qi , qj )
with the interaction potential V(qi,qj). The Hamiltonian equations give the equations of motion
dqi / dt = dH / dpi
dpi / dt = -dH / dqi
In time independent Hamiltonian system the energy and the phase space volume are conserved and special integration methods have to be applied in order to ensure these conservation laws. The odeint library provides classes for separable Hamiltonian systems, which can be written in the form H = Σ pi2 / (2mi) + Hq(q), where Hq(q) only depends on the coordinates. Although this functional form might look a bit arbitrary, it covers nearly all classical mechanical systems with inertia and without dissipation, or where the equations of motion can be written in the form dqi / dt = pi / mi , dpi / dt = f( qi ).
![[Note]](../../images/note.png) |
Note |
|---|---|
A short physical note: While the two-body-problem is known to be integrable, that means it can be solved with purely analytic techniques, already the three-body-problem is not solvable. This was found in the end of the 19th century by H. Poincare which led to the whole new subject of Chaos Theory. |
To implement this system we define a 3D point type which will represent the space as well as the velocity. Therefore, we use the operators from Boost.Operators:
/*the point type */ template< class T , size_t Dim > class point : boost::additive1< point< T , Dim > , boost::additive2< point< T , Dim > , T , boost::multiplicative2< point< T , Dim > , T > > > { public: const static size_t dim = Dim; typedef T value_type; typedef point< value_type , dim > point_type; // ... // constructors // ... // operators private: T m_val[dim]; }; //... // more operators
The next step is to define a container type storing the values of q
and p and to define system functions. As container
type we use boost::array
// we simulate 5 planets and the sun const size_t n = 6; typedef point< double , 3 > point_type; typedef boost::array< point_type , n > container_type; typedef boost::array< double , n > mass_type;
The container_type is different
from the state type of the ODE. The state type of the ode is simply a
pair<
container_type ,
container_type >
since it needs the information about the coordinates and the momenta.
Next we define the system's equations. As we will use a stepper that accounts for the Hamiltonian (energy-preserving) character of the system, we have to define the rhs different from the usual case where it is just a single function. The stepper will make use of the separable character, which means the system will be defined by two objects representing f(p) = -dH/dq and g(q) = dH/dp:
const double gravitational_constant = 2.95912208286e-4; struct solar_system_coor { const mass_type &m_masses; solar_system_coor( const mass_type &masses ) : m_masses( masses ) { } void operator()( const container_type &p , container_type &dqdt ) const { for( size_t i=0 ; i<n ; ++i ) dqdt[i] = p[i] / m_masses[i]; } };
struct solar_system_momentum { const mass_type &m_masses; solar_system_momentum( const mass_type &masses ) : m_masses( masses ) { } void operator()( const container_type &q , container_type &dpdt ) const { const size_t n = q.size(); for( size_t i=0 ; i<n ; ++i ) { dpdt[i] = 0.0; for( size_t j=0 ; j<i ; ++j ) { point_type diff = q[j] - q[i]; double d = abs( diff ); diff *= ( gravitational_constant * m_masses[i] * m_masses[j] / d / d / d ); dpdt[i] += diff; dpdt[j] -= diff; } } } };
In general a three body-system is chaotic, hence we can not expect that arbitrary initial conditions of the system will lead to a solution comparable with the solar system dynamics. That is we have to define proper initial conditions, which are taken from the book of Hairer, Wannier, Lubich [4] .
As mentioned above, we need to use some special integrators in order to
conserve phase space volume. There is a well known family of such integrators,
the so-called Runge-Kutta-Nystroem solvers, which we apply here in terms
of a symplectic_rkn_sb3a_mclachlan
stepper:
typedef symplectic_rkn_sb3a_mclachlan< container_type > stepper_type; const double dt = 100.0; integrate_const( stepper_type() , make_pair( solar_system_coor( masses ) , solar_system_momentum( masses ) ) , make_pair( boost::ref( q ) , boost::ref( p ) ) , 0.0 , 200000.0 , dt , streaming_observer( cout ) );
These integration routine was used to produce the above sketch of the solar
system. Note, that there are two particularities in this example. First,
the state of the symplectic stepper is not container_type
but a pair of container_type.
Hence, we must pass such a pair to the integrate function. Since, we want
to pass them as references we can simply pack them into Boost.Ref.
The second point is the observer, which is called with a state type, hence
a pair of container_type.
The reference wrapper is also passed, but this is not a problem at all:
struct streaming_observer { std::ostream& m_out; streaming_observer( std::ostream &out ) : m_out( out ) { } template< class State > void operator()( const State &x , double t ) const { container_type &q = x.first; m_out << t; for( size_t i=0 ; i<q.size() ; ++i ) m_out << "\t" << q[i]; m_out << "\n"; } };
![[Tip]](../../images/tip.png) |
Tip |
|---|---|
You can use C++11 lambda to create the observers |
The full example can be found here: solar_system.cpp